mustasaare tarkvarabüroo
a surveillance software company
RSP Application Software
Software for Radar Signal Processing
The RSP Application Software is a radar signal processing software suite for acquiring and processing analog or digital radar video from radars produced by a number of manufacturers (Consilium, Furuno, Kelvin-Hughes, Navico, Raytheon, Terma, etc). It provides tools for radar video capturing and broadcasting, plot extraction and target tracking as well as radar control.
After the acquisition of the radar signal, the RSP preprocesses it in the digital domain: correlates pulse-to-pulse and applies FTC by a modified high pass filter. Both static and dynamic STC are applied next. After the STC processing, both pulse-to-pulse and scan-to-scan correlation is performed on the thresholded video.
The preprocessed video signal is then passed to the radar signal broadcast module and to the plot extraction module. The radar signal broadcast module employs a CFAR processor for filtering out target-like echoes from the radar signal. The filtered signal is then correlated scan-to-scan, compressed and sent to the network. Similarly, the plot extraction module extracts target-like echoes and forwards these to the target tracking module.
Finally, the target tracking module uses the extracted plots to build a consistent traffic picture of the whole surveillance area of the radar. It uses a state-of-the-art Interacting Multiple Models (IMM) kinematic filter with a nonlinear channel to accurately model the target movements encountered in the traffic of vessels.
The target tracking module supports asynchronous input from multiple radar sensors and can produce a combined output (track fusion).
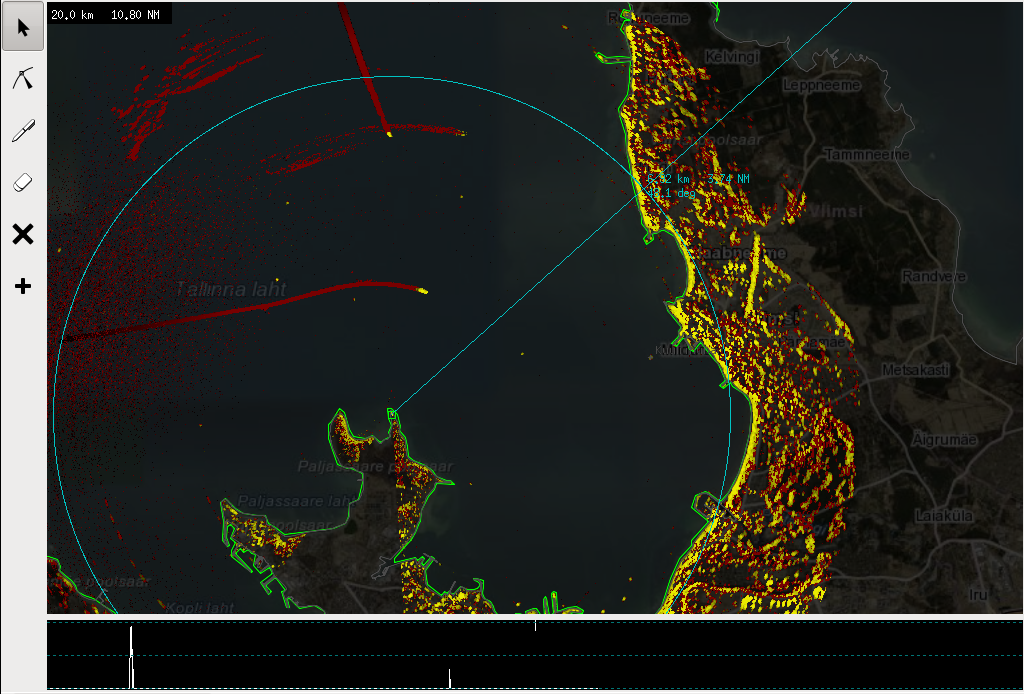
All the parameters of the RSP can be viewed and configured by a graphical user interface, using a provided service display application (PPI).
RSP Application Software can be run on a PC-compatible server or a RSP 347 Radar Signal Processing Unit (embedded version).
The main features of the RSP Application Software are:
| Application software modules |
|
| FTC | Modified high pass filter, with configurable time constant |
| Static STC | Signal amplitude correction by a static ramp |
| Dynamic STC | Signal amplitude correction by a dynamically updated clutter map |
| Filtering | CA-CFAR (with a choice of LT, GT or AVG), OS-CFAR, Scan-to-Scan correlation |
| Bit depth | 1-8, static or dynamic |
| Bandwidth | 64 kBit/s … 5 Mbit/s, static or dynamic |
| Filtering | CA-CFAR (with a choice of LT, GT or AVG), OS-CFAR, Scan-to-Scan correlation |
| Plot criteria | Size of the plot, both in azimuth and in distance; local density |
| Plot density | Up to 6000 per scan |
| Plot association algorithm | NNCJPDA, MHT |
| Kinematic filter | IMM, configurable, up to 6 channels |
| Kinematic filter channel types |
|
| Maximum acceleration | Configurable per channel, up to 20 m/s2 |
| Maximum speed | Configurable per channel, up to 120 m/s |
| Maximum turn rate | Configurable per channel for EKF, up to 30 °/s |
| Maximum number of tracks | Configurable, up to 2000 moving and up to 2000 stationary tracks |
| Multisensor support | Asynchronous multisensor tracking capabilities (track fusion) |